
Cù u sviluppu tecnologicu di i robots di serviziu, i robots di pulizia di piscine sottumarini sò largamente appiicati in u mercatu. Per rializà e so rotte di pianificazione automatica, costu-efficace è adattativaultrasuoni sott'acqua chì varieghjai sensori per evitari l'ostaculi sò indispensabili.
VastaMercatu
Finu à avà, l'America di u Nordu hè sempre u più grande mercatu in u sviluppu di u mercatu globale di piscine (Technavio Market Report, 2019-2024). Ci hè digià più di 10,7 milioni di piscine in i Stati Uniti, è u numeru di piscine novi, principarmenti di piscine private, cresce annu dopu annu, cù una crescita di 117 000 in 2021. Una media di una piscina per ogni 31 persone. In Francia, u sicondu mercatu di piscine di u mondu, u numeru di piscine private hà superatu 3,2 milioni in 2022. È u numeru di piscine novi hà righjuntu 244 000 in un annu, cù una media di una piscina per ogni 21 persone.
In u mercatu cinese, chì hè duminatu da piscine publica, una media di circa 43 000 persone sparte una palestra (ci sò 32 500 piscine in u paese, basatu annantu à una populazione di 1,4 miliardi).
A Spagna hà u quartu numaru di piscine in u mondu è u sicondu numeru di piscine in Europa, cù 1,3 milioni di piscine (residenziale, publica è cullettiva).
Da u glubale--China paraguni mercatu robot piscina, u mercatu Chinese dimensioni mercatu hè menu cà 1% di u mondu, u mercatu principali hè sempre Europe è i Stati Uniti. Dati mostranu chì in 2021, a dimensione di u mercatu glubale robot piscina di quasi 11,2 miliardi RMB, vendite di più di 1,6 milioni di unità, solu u canali in linea di i Stati Uniti. I spedizioni di robot di pulizia di piscine anu righjuntu più di 500 000 unità in 2021.E u so tassu di crescita anu più di 130%, appartene à a prima fase di crescita rapida.
Attualmente, u mercatu di pulizia di piscine hè sempre duminatu da a pulizia manuale, è in u mercatu glubale di pulizia di piscine, a pulizia manuale cuntene circa 45%, mentre chì i robots di pulizia di piscine contanu per circa 19%. In u futuru, cù l'aumentu di i costi di u travagliu è a popularisazione di e tecnulugia di l'industria cum'è a percezione visuale, a percepzione ultrasonica, a pianificazione intelligente di u percorsu, l'Internet di e cose, SLAM (pusizionamentu istantaneu è tecnulugia di custruzzione di carte) è altre tecnulugia cunnesse, robot di pulizia di piscine. cambierà gradualmente da funziunali à intelligenti, è u tassu di penetrazione di i robots di pulizia di piscina serà più migliuratu.
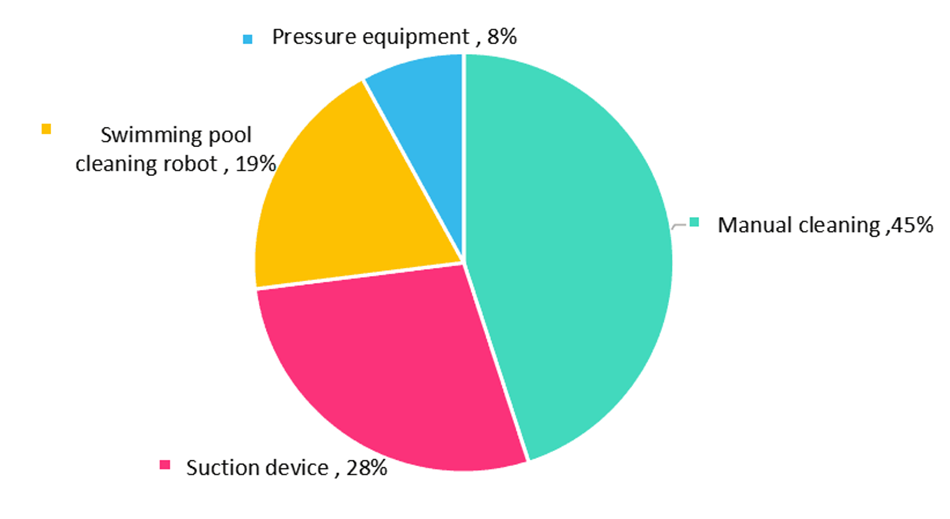
Tasso di penetrazione di u mercatu globale di pulizia di piscine in 2021
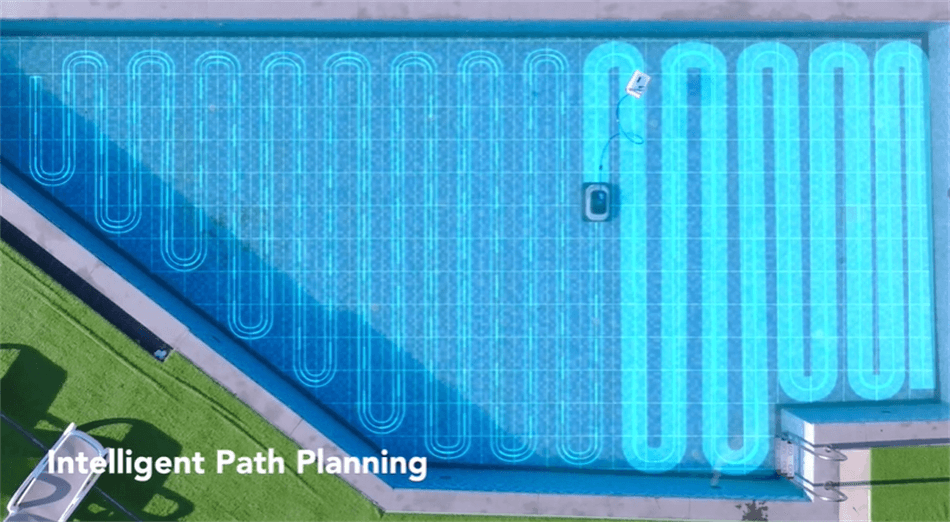
Sensazioni dedicate, i sensori di distanza sottumarini aiutanu à unatationrobot di pulizia di piscina per evità ostaculi in modu intelligente
U sensoru ultrasonicu di evità di l'ostaculi per a misurazione di a distanza subacquea hè un tipu di sensoru utilizatu in robot per evità l'ostaculi subacquei. U sensoru usa a tecnulugia di misurazione di distanza subacquea ultrasonica per misurà a distanza trà u sensoru è l'ughjettu misuratu. Quandu u sensoru rileva un ostaculu, a distanza di l'ostaculu hè tornata à u robot, è u robot pò piantà, gira, rallentà, navigà u muru, cullà u muru è altre operazioni secondu a direzzione installata da u sensoru è u ritornu. distanza valore à rializà u scopu di pulizziari automaticamente a piscina è evitendu l'ostaculu.
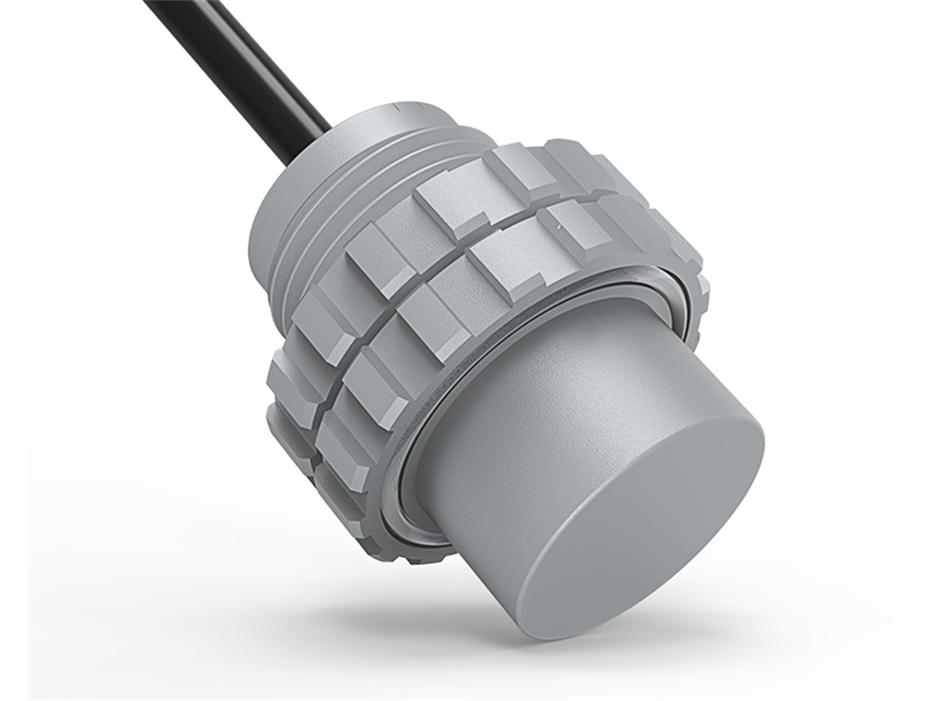
It venehere——Sensore di distanza subacquea L08
U layout avanti di u sensoru DSP, a ricerca indipendente è u sviluppu di i sensori sottumarini, per mezu di a cunfigurazione di sensori sottumarini in u robot sottumarinu, cusì chì u robot di pulizia di a piscina hà a funzione di pianificazione di evità di l'ostaculi.
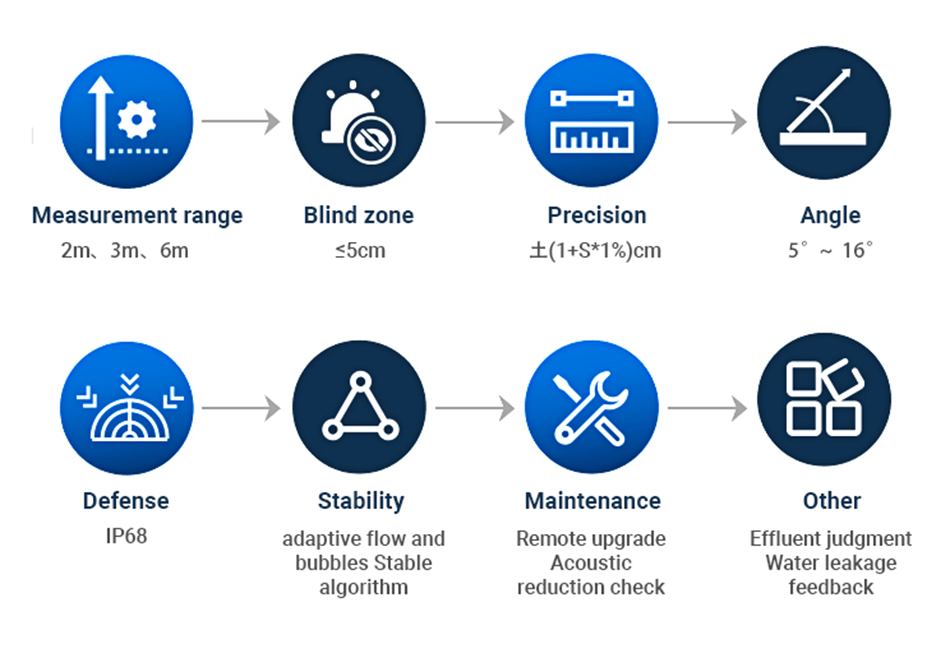
U modulu L08 hè un sensoru ultrasonicu di evità di l'ostaculi subacquei cuncepitu per l'applicazioni sott'acqua. Havi i vantaghji di una piccula dimensione, una piccula zona cieca, una alta precisione è una bona prestazione impermeabile. Support modbus protocol.There sò differente gamma, Angle è specificazioni zona cecu per differente bisogni di utilizatori à sceglie.
Parametri basi:
Scopu à i punti di dolore, innuvà è sfondate
Cumu megliu empower u robot di pulizia di piscina à traversu u sensoru chì varieghja sottumarinu, è ghjunghje sin'à innovazioni tecnologiche fattibili, l'integrazione cumpleta di a catena di servizii è soluzioni.Dianyingpu hè stata focu annantu à a so ricerca è sviluppu. punti di dolore di u mercatu è innuvà per rompe.
(1) altu costu, ùn ci hè micca manera di popularize l'applicazione di i prudutti di u cunsumu: i sensori di rilevazione sottumarini chì sò venduti in casa è in l'esteru, u prezzu varieghja da millaie di yuan. ùn hè micca largamente utilizatu attualmente.
Cumminatu cù i bisogni di u costu di u costu di i robot di cunsumatori sottumarini, a cumpagnia hà studiatu è sviluppatu in modu indipendenti i parametri di cuncordanza di trasduttori, a localizazione di i materiali core è l'esperienza di produzzione di massa. U costu hè stata ridutta à menu di 10% di l'industria, pioneering l'adopzione di sensori sottumarini in l'elettronica di cunsumu.
(2) Pover cumpatibulità di i paràmetri di sensori nantu à u mercatu: un sensoru hè luntanu, l'area ceca hè chjuca, è i paràmetri cumpatibili di l'Angle ùn sò micca dispunibili nantu à u mercatu, chì spessu abbisogna a cumminazzioni di una varietà di sensori, è u costu di cumminazzioni hè altu.
Sviluppatu un transducer multi-beam-frequency, chì risolve i paràmetri di alta qualità di distanza, area ceca è angulu.
①L'angolo multi-fasci hè vicinu à 90 °, è a gamma pò suddisfà più di 6m, scuntrà l'area cieca in 5cm, è a cumpatibilità di i scenarii d'applicazione hè assai alta.
② U materiale core di u sensoru ultrasonicu hè u trasduttore di piastra ceramica, u pruduttu adopta a frequenza radiale è a frequenza di spessore di u schema di design intelligente di piastra ceramica, è dopu attraversu l'adattazione di l'unità è l'adattazione di filtru passa di banda, a frequenza di risonanza di frequenza radiale. hè bassu, l'angolo di misurazione hè grande, a freccia di risonanza di freccia di spessore hè alta, a penetrazione hè forte, a distanza di misurazione hè luntanu è i paràmetri di l'area cieca sò cunsiderate.
(3) In l'ambiente subacqueu cumplessu hè inestabile: quandu ci hè acqua di turbidità, grande flussu d'acqua, erba d'acqua di limo sott'acqua, i dati di u sensoru sò basamenti falluti, chì u robot ùn pò micca ghjudicà l'operazione in modu intelligente.
U prublema utilizatu in l'ambiente sottumarinu cumplessu hè risoltu da a cumminazione intelligente di multi-fasci di frequenza doppia è algoritmu adattativu è u processu di filtru Kalman. A superposizione di vantaghji di frequenze diverse, un drive intelligente multi-beam, diversificazione di modi di travagliu, putenza, angulu, qualità di signale ponu adattà à i cambiamenti di scena.
Struttura di u produttu è prucessu:
(1) a struttura hè simplice in l'apparenza, chjuca in grandezza, a stallazione solu bisognu di mette u foru cunsigliatu in a cunchiglia per stringhje a noce, cunnessu i dati di output normale di l'equipaggiu rapprisentanu a stallazione hè cumpleta; Mantenimentu più tardi solu bisognu di turnà nantu à a noce per caccià u sensoru, funziunamentu simplice, riduce u costu d'apprendimentu di a stallazione è di mantenimentu.
(2) u prucessu di prodottu, u transducer usa tecnulugia non-contact varieghja, struttura integrata chjusu.E tutta a macchina adopra u disignu dustproof è waterproof. U circuitu internu usa a cola di resina epossidica in potting prutezzione cumpletamente imballata, l'effettu impermeabile pò ghjunghje à u livellu IP68.
Ricercaindependentlyèfunzione affidabile
In u prucessu di sviluppu di u sensoru, a squadra di R & D hà ottimizatu è ripetutu ripetutamente parametri multidimensionali cum'è a stabilità di dati, l'influenza di u flussu d'acqua, a frequenza è a fabricabilità. È realizatu testi multidimensionali strettamente cumminati cù e cundizioni di travagliu reali di u robot di pulizia di piscine per migliurà ulteriormente l'adattabilità di u sensoru à l'ambiente è e cundizioni di travagliu.
À u listessu tempu, Dianyingpu hà sempre mantinutu u timore di a tecnulugia, sensori sottumarini cum'è un cumpunenti misurazione, paragunatu cù u disignu è debugging, pruduzzione è calibration hè più impurtante, sviluppatu synchronously un inseme cumpleta di testing sensori sottumarini è sistema di calibrazione.
Basatu nantu à u sistema di prova è calibrazione, u sensoru hà subitu teste di affidabilità cum'è u almacenamentu di alta temperatura è alta umidità, prova di scossa calda è fredda, prova di spruzzo di sale, prova di invecchiamento accelerata UV, prova di goccia nuda, prova di immersione liquida (test simulatu di corrosione subacquea) , prova d'impermeabilità di pressione di vacuum, chì hè realizatu in ogni iterazione di prototipu.
Dopu chì u sensoru hè integratu cù u corpu di u robot, a prestazione di tutta a macchina hè pruvata per migliaia d'ore in cumminazione cù l'ambiente di travagliu attuale di u robot. U rendimentu di stu sensoru in a pruduzzione di massa hè più grande di 99%, chì hè stata verificata da a pratica di u mercatu di a pruduzzione batch.
Accumulatu, L08 cuntinueràaghjurnamentu
Revisione u percorsu di sviluppu di i sensori chì varienu sottumarini: ricerca, integrazione, innuvazione, verificazione. Ogni node hè l'innuvazione valente, a ricerca dura è l'accumulazione ricca di putere in u campu di a tecnulugia. L08 hè u primu pruduttu di l'applicazione di gamma ultrasonica subacquea di a cumpagnia. A cumpagnia lanciarà più prudutti basati nantu à l'evitazione di l'ostaculi subacquei è l'esplorazione di prufundità di robot sottumarini.
In u futuru, cù a prumuzione di i robots sottumarini, i sensori di spazii sottumarini cum'è u supportu chjave per a sensazione intelligente di robots sottumarini, certamenti portaranu cambiamenti enormi à l'industria è u campu di i robot subacquei.
Tempu di Postu: Aug-04-2023